
| บทความจากคณะ ศิวกร ประเสริฐสิงห์กุล สุกัญญา เชยโพธิ์ นิสิตปริญญาโท ภาควิชาวิศวกรรมสำรวจ อ. ดร. ชัยโชค ไวภาษา อาจารย์ประจำภาควิชาวิศวกรรมสำรวจ คณะวิศวกรรมศาสตร์ จุฬาลงกรณ์มหาวิทยาลัย |
Abstract
การจัดสรรผลผลิตพืชเศรษฐกิจอย่างต้นยูคาลิปตัสเป็นเรื่องที่สำคัญเนื่องจากจะทำให้ผู้ผลิตสามารถจัดการกับผลผลิตให้มีคุณภาพสูงสุด ซึ่งการรู้ปริมาตรของต้นยูคาลิปตัสโดยไม่จำเป็นต้องตัดจะทำให้เราติดตามผลผลิตได้อย่างมีประสิทธิภาพมากยิ่งขึ้น นั่นทำให้เกิดการศึกษานี้ขึ้นมาโดยการใช้เทคนิค Terrestrial Laser Scanning (TLS) เพื่อทำการรังวัดชุดข้อมูล Point Cloud ของต้นยูคาลิปตัสเพื่อพิสูจน์ว่าเทคโนโลยีนี้สามารถนำไปหาปริมาตรแทนการวัดโดยตรงอย่างการตัดต้นยูคาลิปตัสแล้วนำไปชั่ง โดยเมื่อทำการรังวัดได้ชุดข้อมูลมาแล้วจะมีการตัดให้เหลือแต่ส่วนของลำต้นด้วยโปรแกรม Autodesk Revit และนำไปหาปริมาตรต่อด้วยโปรแกรม Cloud Compare โดยอาศัยฟังก์ชัน 2.5D Volume ของโปรแกรมนี้ในการคำนวณ ซึ่งจากการศึกษาพบว่าฟังก์ชันนี้จะมีตัวแปร Grid Step ในการช่วยการสร้าง Raster ที่เอาไว้ใช้คำนวณปริมาตร ซึ่งจากการทดสอบกับต้นยูคาลิปตัสตัวอย่างจะได้ช่วงค่า Grid Step ที่ทำให้ค่าปริมาตรของต้นยูคาลิปตัสตัวอย่างเข้าใกล้ค่าจากการทำ Water Displacement ซึ่งมีค่า Grid Step อยู่ในช่วง 0.00145–0.00165 ที่จะทำให้ค่าความค่าคลาดเคลื่อนอยู่ในช่วง 0–10%
ดังนั้น จะสามารถอธิบายได้ว่าการใช้ TLS ในการหาปริมาตรของต้นยูคาลิปตัสนั้นสามารถทำได้โดยมีค่าความความคลาดเคลื่อนอยู่ในเกณฑ์ที่ยอมรับได้ ซึ่งหากเรานำไปต่อยอดโดยการศึกษากับพืชเศรษฐกิจชนิดอื่นซึ่งคาดว่ามีค่า Grid Step ต่างกันไปตามแต่ละสายพันธุ์จะช่วยทำให้สามารถจัดการผลผลิตของพืชเศรษฐกิจได้ดียิ่งขึ้น
บทที่ 1 บทนำ
1.1 ความเป็นมา และความสำคัญ
ในทางโลกเศรษฐกิจมีพรรณไม้นานาชนิดที่มีความสำคัญทั้งนำเข้า และส่งออกระหว่างประเทศ หนึ่งในนั้นคือต้นยูคาลิปตัส (Eucalyptus) ที่ต้นของมันสามารถนำไปทำผลิตภัณฑ์ และวัตถุดิบที่สำคัญยกตัวอย่างเช่น การทำเฟอร์นิเจอร์ เชื้อเพลิง ส่วนประกอบน้ำมันยาหอม การปลูกเห็ดจากระบบรากของต้นยูคาลิปตัสที่มีสารจุลินทรีย์ที่ส่งเสริมการเติบโตของพืช (Mycorrhiza) และที่สำคัญที่เห็นได้ชัดเจนคือการผลิตเยื้อกระดาษที่เอามาผลิตกระดาษให้เราใช้กันในปัจจุบัน นอกจากนี้ต้นยูคาลิปตัสยังมีความสามารถในการเอาชีวิตรอด หรือทนต่อสภาพของดิน และผลกระทบต่อสภาพแวดล้อมได้ดีทำให้เป็นที่นิยมต่อการลงทุนโดยเฉพาะอย่างยิ่งในประเทศไทยที่มีประวัติการปลูกต้นยูคาลิปตัสมากว่า 100ปี (Pousajja R. 1993) ซึ่งพืชเศรษฐกิจชนิดนี้ยังคงมีความต้องการอย่างต่อเนื่อง เนื่องจากเกี่ยวพันกับอุตสาหกรรมในด้านปัจจุบันเป็นอย่างมาก ทั้งนี้การจัดการการขาย และวัดปริมาณการผลิตต่อไร่ หรือต่อต้นยังคงเป็นที่ลำบากในการคาดการผลผลิตที่แน่นอนรวมทั้งยังคงเสียเวลาในการวัดปริมาตรของต้นยูคาลิปตัสอีกด้วย
ในการหาปริมาตรของต้นยูคาลิปตัสสิ่งที่เราจะต้องรู้คือรัศมี และความสูงของลำต้นยูคาลิปตัสนั้น ๆ ในกรณีที่เราต้องการวัดปริมาตรโดยตรงซึ่งสิ่งนี้จะเป็นกระบวนการที่เสียเวลาค่อนข้างมากเนื่องจากต้นยูคาลิปตัสแต่ละต้นย่อมมีขนาดรัศมี และเส้นผ่านศูนย์กลางที่แตกต่างกัน และเส้นผ่านศูนย์กลางของท่อนหรือลำต้นยังไม่ได้เป็นเลขที่มีความคงที่แต่แปรเปลี่ยนไปตามการเจริญเติบโตตามแต่ละต้น และอีกหนึ่งวิธีที่เป็นการรังวัดปริมาตรของลำต้นยูคาลิปตัสโดยตรงโดยอาศัยหลักการของ Water Displacement ที่เป็นการวัดปริมาตรโดยวัดการแทนที่ของน้ำ (ACS 2020) แต่ทั้งสองวิธีที่กล่าวไปข้างต้นก็ยังคงต้องใช้เวลามากอยู่ดีในการวัดปริมาตรของต้นยูคาลิปตัส แต่จะมีวิธีที่เป็นการใช้ Remote Sensing ในการช่วยสร้างภาพจำลองสามมิติที่เป็นแนวทางเลือกที่น่าสนใจในการนำมาใช้หาปริมาตรของต้นยูคาลิปตัส
ในการจัดการผลผลิตของยูคาลิปตัสเนื่องจากพืชเศรษฐกิจชนิดนี้มีการปลูกเป็นระยะเวลานานในประเทศไทยทำให้การปลูกสายพันธ์ย่อยยังคงมีการปลูกไม่เป็นระเบียบ
ตลอดระยะเวลาที่ผ่านมา และมีการตัดต้นยูคาลิปตัสที่มีขนาดที่ใหญ่กว่าคำสั่งซื้อจึงมีการนำเทคโนโลยี Remote Sensing เข้ามาช่วยในการจัดการผลผลิตเช่น การใช้ UAV หรืออากาศยานไร้คนขับที่มีการติดตั้ง LiDAR หรือ Light Detection and Ranging ที่มีความสามารถในการยิงคลื่นแสงไปกระทบวัตถุแล้วสะท้อนกลับเพื่อบันทึกค่าพิกัด แล้วนำไปทำการจำแนกชนิด โครงสร้างของต้นยูคาลิปตัส และประเภทของสายพันธ์ย่อยได้อีก (Nicolò Camarretta P. et al., 2020) แต่ในด้านการจัดการโครงสร้างด้วย LiDAR ที่ติดตั้งบน UAV ที่กล่าวไปข้างต้นมีการรังวัดความสูงของวัตถุต่ำกว่าความเป็นจริง (Lim k. et al., 2003) เนื่องจากระยะที่ห่างค่อนข้างมากจากบนพื้นดิน
การที่จะเอา LiDAR มาติดตั้งบนพื้นดินแทนจึงเป็นวิธีการที่น่าจะลดค่าความสูงที่ผิดเพี้ยนไปนี้ได้ซึ่งเราเรียกวิธีการนี้ว่า การสำรวจรังวัดพื้นที่ผิวภาคพื้นดินด้วยเครื่องสแกนเลเซอร์สามมิติ (Terrestrial laser scanner) ซึ่งวิธีการนี้จะช่วยให้สามารถทราบถึงปริมาตรโดยการที่ยังไม่จำเป็นต้องตัดต้นยูตาลิบตัสที่ยังคงมีการเจริญเติบโตได้อีก และมีขนาดใหญ่กว่าคำสั่งซื้อ ซึ่งจะช่วยเพิ่มกำไรให้กับการจัดการผลผลิตเป็นอย่างมาก
ทั้งนี้ จากการค้นคว้าในฐานข้อมูลของ Scopus ยังทำให้ทราบว่าแม้จะมีการใช้ LiDAR ในการตรวจหาค่าชั้นเรือนยอด (Canopy) ของต้นยูคาลิปตัสด้วยการรังวัดแบบ Airborne LiDAR (Rodrigo et al., 2020) และมีการรังวัดปริมาตรของต้นยูคาลิปตัสที่มีพื้นที่ศึกษาเป็น Brisbane Forest Park และ Cooloola National Park ประเทศออสเตรเลียที่เป็นป่าฝน (A.Burt et al., 2013) แต่ยังไม่เคยมีการทำเอกสารตีพิมพ์ที่มีการใช้ TLS ในการหาปริมาตรของต้นยูคาลิปตัสที่นำมาเปรียบเทียบกับวิธีการ Water Displacement ในพื้นที่เขตร้อนชื้นอย่างประเทศไทยมาก่อน
ดังนั้นงานวิจัยนี้จะเป็นงานวิจัยแรกที่จะมีการหาปริมาตรของต้นยูคาลิปตัสโดยการใช้ TLS แล้วนำมาเปรียบเทียบกับวิธี Water Displacement ที่เป็นการหาปริมาตรโดยตรงที่มีตัวอย่างเป็นต้นยูคาลิปตัสที่มีพื้นที่ปลูกในประเทศไทยเพื่อดูว่าค่าปริมาตรมีความแตกต่างมากน้อยเพียงใด เพื่อแสดงให้เห็นว่าวิธีดังกล่าวสามารถใช้แทนการวัดปริมาตรโดยตรงได้ และมีประโยชน์ช่วยในการจัดการผลผลิตของต้นยูคาลิปตัสได้จริง ๆ
1.2 วัตถุประสงค์ของงานวิจัย
เพื่อหาปริมาตรของต้นยูคาลิปตัสด้วยวิธีการรังวัดสำรวบนภาคพื้นดินเทียบกับการวัดปริมาตรของต้นยูคาลิปตัสโดยตรงด้วยวิธีการ Water Displacement
1.3 สมมติฐานของงานวิจัย
การรังวัดปริมาตรของต้นยูคาลิปตัสด้วยวิธีการรังวัดสำรวจบนภาคพื้นดินด้วยเครื่องแสกนเลเซอร์สามมิติสามารถหาค่าปริมาตรของต้นยูคาลิปตัสได้ดี และค่อนข้างแม่นยำจากปริมาตรที่แท้จริง
1.4 ขอบเขตของงานวิจัย
ในงานวิจัยนี้มีการใช้ต้นยูคาลิปตัสโดยเป็นต้นไม้ตัวอย่างจำนวน 1 ต้นในการวัดปริมาตรทั้ง 2 แบบทั้งการใช้ TLS และ Water Displacement เพื่อเอามาเปรียบเทียบความถูกต้องโดยต้นตัวอย่างนำมาจากแปลงปลูกในพื้นที่บ้านบุ ตำบลตลาด อำเภอเมือง จังหวัดนครราชสีมา
1.5 ประโยชน์ที่คาดว่าจะได้รับ
1.5.1 เพื่อให้ทราบว่าวิธีการรังวัดด้วย TLS ในการหาปริมาตรของต้นยูคาลิปตัสสามารถใช้แทนการรังวัดโดยตรงแบบ Water Displacement ได้จริงหรือไม่
1.5.2 เพื่อสนับสนุนการจัดการผลผลิตของต้นยูคาลิปตัส ให้มีความคุ้มค่าในการจัดการซื้อขายในฐานะพืชเศรษฐกิจที่สำคัญชนิดหนึ่งของประเทศไทย
บทที่ 2 ทฤษฎีที่เกี่ยวข้อง
2.1 Light Detection and Ranging (LiDAR)
วิธีการรังวัดด้วย LiDAR เป็นวิธีการรังวัดโดยเก็บค่าข้อมูลสัญญาณเลเซอร์ที่สะท้อนกลับมาที่เรียกว่า Point Cloud ซึ่งจะได้ค่าที่มีพิกัดเป็น 3 มิติ กล่าวคือมีทั้งพิกัดทางราบและทางดิ่ง มีความละเอียดในระดับเดซิเมตร เป็นวิธีการหนึ่งในการสร้างแบบจำลองแบบหนึ่งที่นิยมใช้งานกันในปัจจุบัน ซึ่งสามารถนำไปติดบนอากาศยานไร้คนขับ หรือ UAV ได้ และรวมไปถึงการประยุกต์ในระดับภาคพื้นดินที่เรียกว่า Terrestrial Laser Scan (ไพศาล สันติธรรมนนท์ 2555)
2.2 Terrestrial laser scan (TLS)
การรังวัดบนภาคพื้นดินด้วยเครื่องสแกนเลเซอร์สามมิติ หรือ Terrestrial Laser Scan เป็นการนำ LiDAR มาประยุกต์ใช้ในการรังวัดภาคพื้นดินโดยการยิงเลเซอร์จากเครื่อง TLS แล้วอาศัยหลักการสะท้อนกลับของคลื่น กลับเข้าสู่ตัวเครื่องที่ปล่อยเลเซอร์ออกไป ซึ่งตัว TLS สามารถทำการรังวัด point cloud ได้ 104–106 จุดต่อวินาที และมีความละเอียดอยู่ที่ 10-1–100 เซนติเมตร (Goudie A. 2010) โดยวิธีนี้เมื่อเราใช้การรังวัดข้อมูลแบบไม่เคลื่อนที่แต่ขึ้นอยู่กับระยะทาง เราสามารถแบ่งประเภทชนิดของเลเซอร์ได้ออกเป็น 3 ชนิด (Petrie G. and Charles K. Toth 2009) ดังนี้
2.2.1 Short Range Laser Scanners เป็นช่วงคลื่นสั้นที่มีระยะห่างระหว่างตัวปล่อยเลเซอร์ และวัตถุที่สนใจต่างกันไม่เกิน 100 เมตร ซึ่งเป็นที่นิยมในการจัดการเก็บรายละเอียดภายในเช่น โบราณสถาน และงานเก็บรายละเอียดภายในอาคาร เป็นต้น
2.2.2 Medium Range Laser Scanners เป็นช่วงคลื่นที่สูงกว่า Short Range ขึ้นมาระดับหนึ่ง โดยมีระยะห่างระหว่างตัวเครื่อง TLS ที่เป็นตัวกำเนิดและปล่อยเลเซอร์ กับวัตถุหรือพื้นผิวที่สนใจอยู่ที่ 150–300 เมตร ซึ่งมีการใช้หลักการ Pulse Ranging Technique เข้ามาช่วย ระยะเลเซอร์ระดับปานกลางนี้เหมาะสำหรับการใช้ในงานออกนอกพื้นที่ เช่น การติดตามการก่อสร้างสะพาน และการติดตามโครงสร้างภายนอกอาคาร เป็นต้น
2.2.3 Long Range Laser Scanners เป็นระดับช่วงคลื่นในการปล่อยของเลเซอร์ที่สูงที่สุด โดยมีระยะห่างระหว่างตัวเครื่อง TLS และวัตถุที่สนใจอยู่ที่ 500 เมตร ขึ้นไป โดยใช้หลักการ TOF (Time of Flight) Measuring Principle ในการเก็บข้อมูลซึ่งการใช้ช่วงเลเซอร์ระดับนี้มักนิยมใช้ในการเก็บข้อมูลที่ต้องการเป็นวงกว้าง และมีการเกาะกลุ่มกันของวัตถุที่สนใจ
ทั้งนี้ เราสามารถปรับการเก็บค่าของ TLS ได้โดยการเลือกว่าจะเอาเป็น First Pulse หรือ Last Pulse ซึ่งขึ้นอยู่กับบริเวณที่ศึกษา และความต้องการของข้อมูลตามที่ผู้ใช้ต้องการ
2.3 Water Displacement
เป็นหลักการในการรังวัดปริมาตรของวัตถุโดยการอาศัยการแทนที่ของน้ำ พูดอีกรูปแบบหนึ่งคือ เรารู้ปริมาตรน้ำก่อนที่เราจะใส่วัตถุที่สนใจลงไป แล้วเมื่อเราใส่วัตถุที่สนใจลงไปจะทำให้ปริมาตรของน้ำเพิ่มสูงขึ้น โดยการวัดปริมาตรนี้จะเห็นผลได้ชัดเจนที่วัตถุที่มีความถ่วงจำเพาะ (Specific Gravity) มากกว่าน้ำ ซึ่งน้ำที่อุดมคติจะมีความถ่วงจำเพาะเท่ากับ 1 และอาศัยความสัมพันธ์ระหว่างความหนาแน่น (Density) เท่ากับมวล (Mass) ส่วนด้วยปริมาตร (Volume) (ACS 2020)
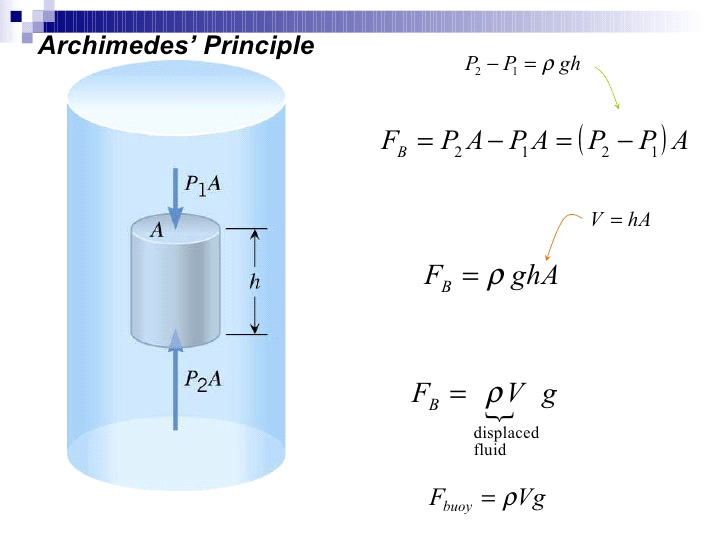
โดยมีสมการความสัมพันธ์ดังนี้
W = mg = 1gV1 —(สมการที่ 1)
FB = 2gV2 –-(สมการที่ 2)
เมื่อ W คือ น้ำหนักของวัตถุ (N)
FB คือ แรงพยุงลอยตัว (N)
m คือ มวลของวัตถุ (Kg)
g คือ ค่าแรงโน้มถ่วงโลก (m/s2)
คือ ค่าความหนาแน่นของของเหลว (Kg/m3)
V คือ ปริมาตรของของเหลวที่ถูกแทนที่ (m3)
จากสมการเข้าสู่สมดุล
F = 0
W = FB
1gV1 = 2gV2
1V1 = 2V2 –(สมการที่ 3)
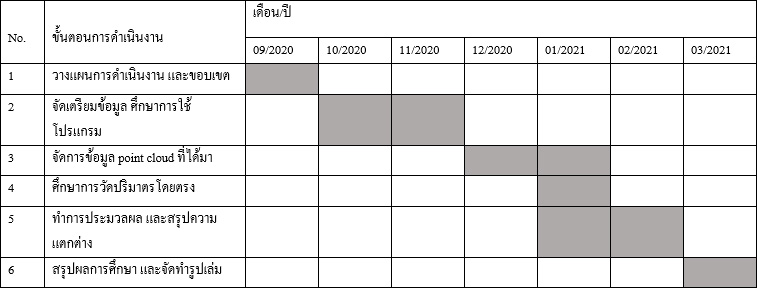
บทที่ 3 ขั้นตอนการดำเนินงาน
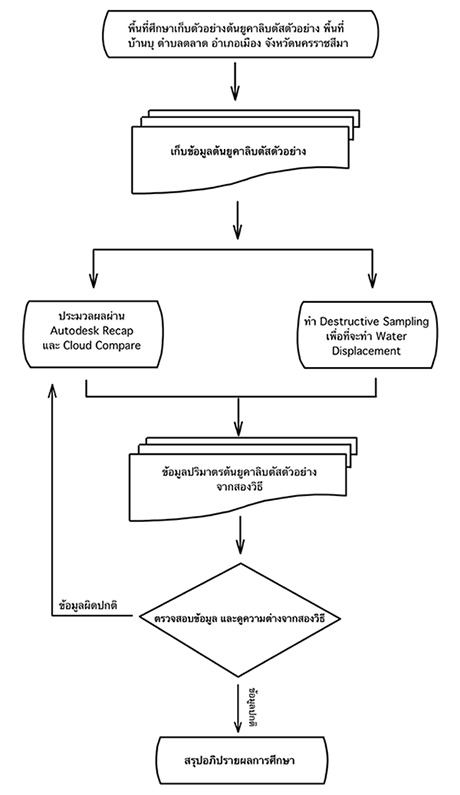
3.1 พื้นที่ศึกษา
พื้นที่ที่นำเอาต้นยูคาลิปตัสตัวอย่างมาทำการทดสอบอยู่ในพื้นที่ บ้านบุ ตำบลตลาด อำเภอเมือง จังหวัดนครราชสีมา
โดยพื้นที่นี้มีลักษณะการปลูกจำนวน 4 แถว แถวละ 4 กอ ซึ่งต้นที่ทดสอบมีการไว้หน่อจากการตัดจากต้นหลักมาแล้วประมาณ 1 ปี โดยต้นยูคาลิปตัสที่เอามาทดสอบเป็นต้นที่ได้มาจากการสุ่มตัวอย่างเพียงหนึ่งตัวอย่างจากต้นยูคาลิปตัสทั้งหมดในพื้นที่
3.2 การเก็บข้อมูลตัวอย่าง
ในการเก็บข้อมูลตัวอย่างจะแบ่งออกเป็น 2 ส่วนคือ ส่วนที่ทำการรังวัดด้วย TLS รุ่น Topcon รุ่น GLS2000 และส่วนที่มีการทำแบบตัดต้นไม้ตัวอย่าง (Destructive Sampling) แล้วนำไปใช้ในวิธี Water Displacement โดยข้อมูลต้นยูคาลิปตัสตัวอย่างมี นางสาวสุกญัญา เชยโพธิ์ เป็นผู้เก็บข้อมูล และเป็นผู้ให้ความอนุเคราะห์อนุญาตให้ใช้ข้อมูล
เลเซอร์แสกนของต้นยูคาลิปตัสตัวอย่าง 1 ต้น (C1) รวมทั้งข้อมูลการรังวัดปริมาตรแบบ Water Displacement ของต้นยูคาลิปตัสตัวอย่าง (C1)
3.2.1 การรังวัดภาคพื้นดินด้วยเลเซอร์แสกน (TLS)
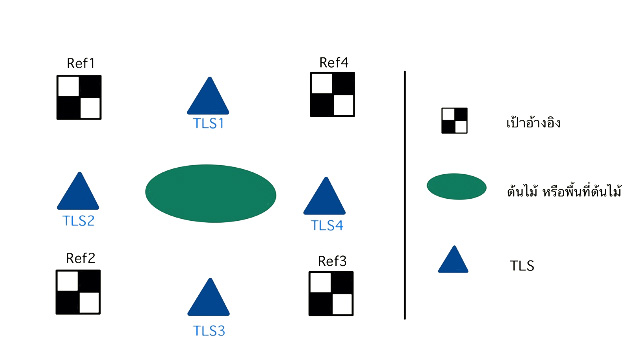
ในส่วนวิธีนี้จะมีการจัดการสร้าง และวางแผนการรังวัดโดยมีการตั้งเครื่องเลเซอร์สแกนทั้งหมด 4 ครั้ง รอบต้นยูคาลิปตัสตัวอย่างที่จะทำการศึกษาพร้อมทั้งจัดทำเป้าอ้างอิง

ในตัวกล้องรุ่นนี้ที่ใช้ในการรังวัดจะมีคุณสมบัติดังตารางต่อไปนี้
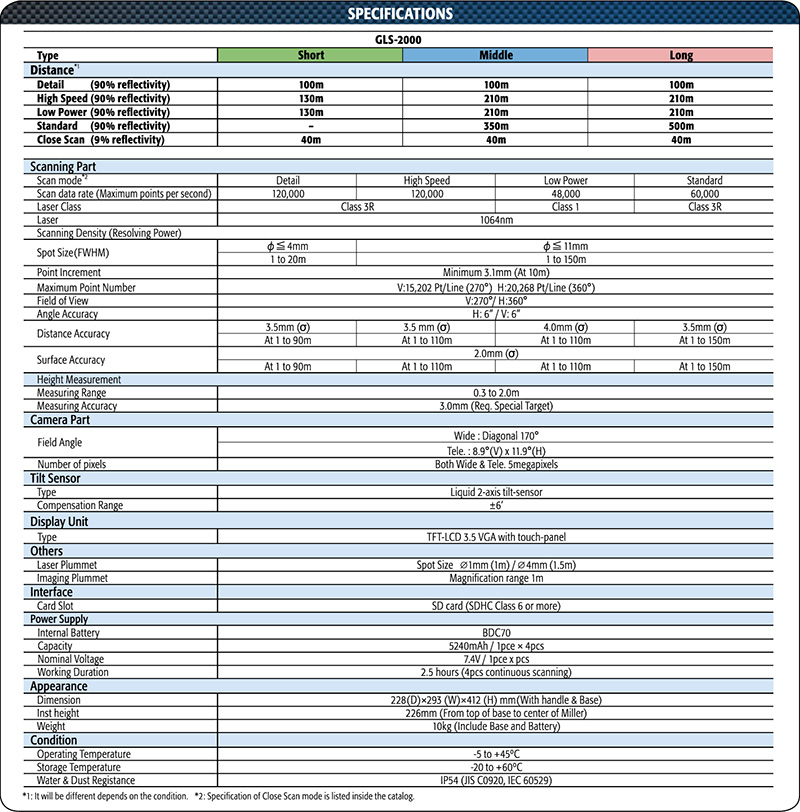
โดยมีการจัดทำเป้าอ้างอิงทั้งหมด 4 เป้า โดยมีเงื่อนไขในการรังวัดที่การรังวัด (TLS) หนึ่งครั้งจะต้องเห็นเป้าอ้างอิงอย่างน้อย 3 เป้าจาก 4 เป้าต่อการรังวัดหนึ่งครั้ง ทั้งนี้เครื่อง TLS Topcon รุ่น GLS2000 จะต้องมีการตั้งค่ากำหนดระยะเวลาในการรังวัด และมุมองศาในการเคลื่อนที่ต่อการขยับ 1 ครั้ง ซึ่งเป็นตัวกำหนดขนาด และความละเอียดของข้อมูล Point Cloud นั้น ทั้งนี้เราสามารถเลือกเก็บ Pulse ได้โดยการเลือก First กับ Last ในฟังก์ชันของการรังวัด ความแตกต่างของ 2 อย่างนี้คือ การเก็บค่าที่สะท้อนแรกสุด หรือหลังสุด ซึ่งการเลือกแบบ Last มักเป็นการเลือกในกรณีที่มีบางสิ่งมาบดบังวัตถุที่กำลังสำรวจเป็นต้น
หลังจากที่เราทำการรังวัดข้อมูลเสร็จเรียบร้อยแล้ว เราจะนำข้อมูลมาจาก TLS ทั้ง 4 ด้านมาสร้างชุดข้อมูล point cloud เพียง 1 ชุดข้อมูล โดยการใช้โปรแกรม Autodesk Recap
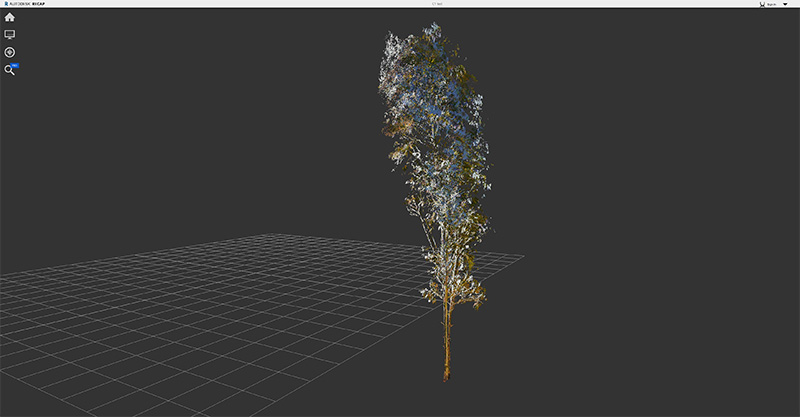
เมื่อทำการสร้างเสร็จแล้วเราจะนำข้อมูลดังกล่าวไปตัดแต่งให้เหลือแต่ลำต้นแล้วเราจะนำข้อมูลนั้นไปเข้าโปรแกรม Cloud Compare(CC) ซึ่งมีความสามารถในการคำนวณหาปริมาตรของ Point Cloud ได้โดยการใส่ค่าข้อมูลที่ได้รับการปรับแต่งจากโปรแกรม Autodesk Recap
3.2.2 การทำ Water Displacement
หลังจากทำการรังวัดภาคพื้นดินเสร็จสิ้นแล้ว เราจะทำการตัดต้นยูคาลิปตัสที่ทำการรังวัดนั้นโดยการตัดจะเริ่มตั้งแต่โคนของต้นขึ้นไปแล้วทำการแบ่งเป็นท่อน ๆ ท่อนละ 0.80 เมตร โดยการชั่งเครื่องชั่งที่มีความละเอียดที่ 0.01 กิโลกรัม
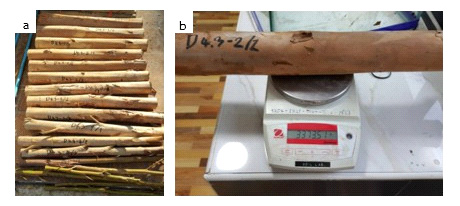
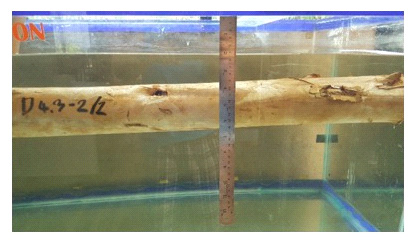
หลังจากนั้นจะมีการใส่ท่อนไม้ของลำต้นยูคาลิปตัสลงไปในน้ำกลั่นเพื่อใช้การแทนที่ด้วยน้ำ (Water Displacement) ที่มีวัตถุประสงค์การหาปริมาตรของลำต้นยูคาลิปตัสที่ทำการตัดแบ่งเป็นท่อน ๆ
3.2.3 นำข้อมูลปริมาตรที่ทำมาทั้งสองแบบมาดูว่าค่ามีความต่างมากน้อยเพียงใด แล้วทำการสรุปผลการวิจัย
บทที่ 4 ผลการปฏิบัติงาน
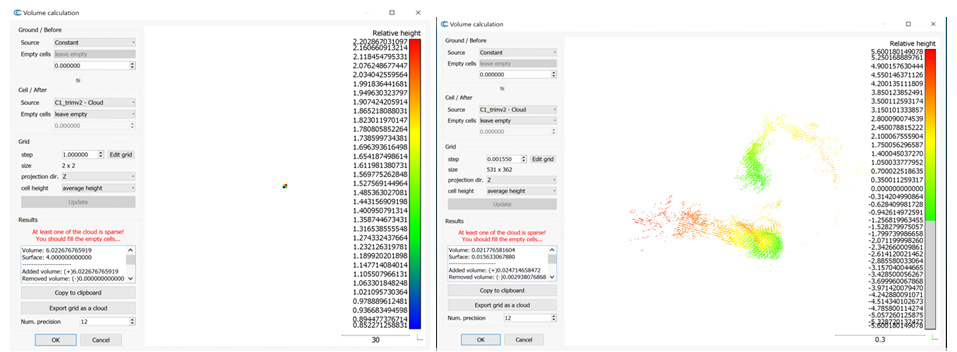
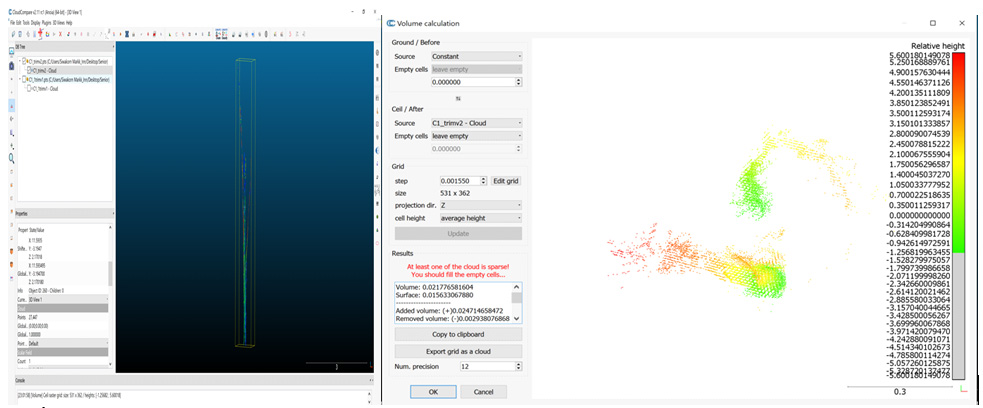
จากผลการนำข้อมูล point cloud ของต้นยูคาลิปตัสตัวอย่างจำนวนหนึ่งต้นที่ได้นำเข้าโปรแกรม Autodesk Revit เพื่อทำการตัดแต่งข้อมูลให้เหลือแต่ส่วนของลำต้น และนำเข้าโปรแกรม Cloud Compare เพื่อหาปริมาตรของ point cloud โดยใช้ฟังก์ชัน 2.5D volume ซึ่งมีความสามารถในการหาปริมาตรผ่านการสร้าง raster ที่ปรับเปลี่ยนตามค่า grid step ที่เป็นตัวกำหนดการสร้าง rasterization ในการคำนวณ volume ดังนี้
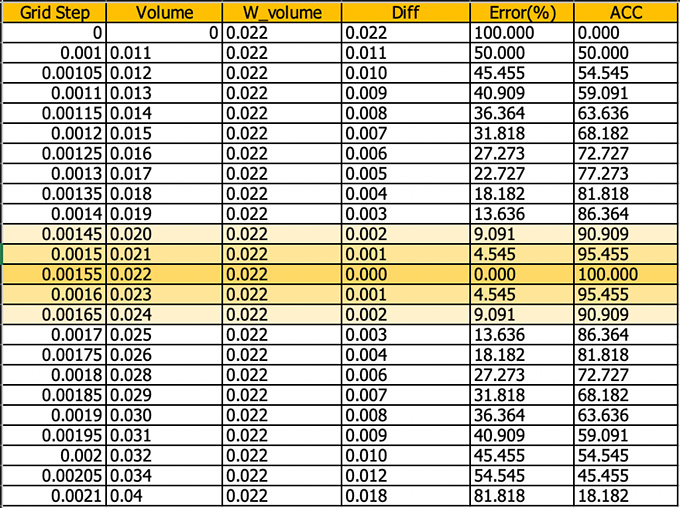
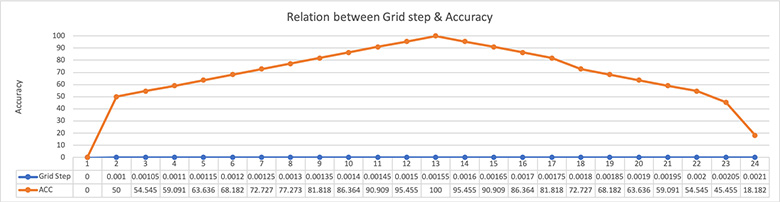
จากตารางและกราฟค่าความสัมพันธ์ระหว่างค่า Grid Step และค่าความถูกต้องที่เป็นการเทียบจำนวนปริมาตรจากการทำ Water Displacement และจากโปรแกรม Cloud Compare จะสังเกตได้ว่าค่า Accuracy เริ่มลู่เข้าสู่ 100% และมีค่าประมาณที่ 90% ขึ้นไปอยู่ในช่วงระหว่างค่า Grid Step ที่ 0.00145–0.00165 ซึ่งมีค่าความถูกต้องที่สูงที่สุดที่ปริมาตรจากโปรแกรมใกล้เคียงกับปริมาตรที่ได้จาก Water Displacement อยู่ที่ 100% ที่ความละเอียดระดับมิลลิเมตร (จากความละเอียดอุปกรณ์ทั้งหมดมีความละเอียดในระดับมิลลิเมตร) เมื่อมีค่า Grid Step ที่ 0.00155 โดยมีค่าปริมาตรจากโปรแกรมเท่ากับ 0.022 ลูกบาศก์เมตร และปริมาตรจากการทำ Water Displacement เท่ากับ 0.022 ลูกบาศก์เมตร ตามลำดับ
บทที่ 5 อภิปรายผล
จากผลที่ได้แสดงให้เห็นว่า Terrestrial Laser Scanner (TLS) มีความสามารถในการหาปริมาตรของวัตถุผ่านการเก็บข้อมูลแบบ Point Cloud และมีค่าความถูกต้องแปรพันธ์ไปตามค่า Grid Step ที่ใช้ในการ Rasterization เพื่อหาปริมาตรของ Point Cloud นอกจากนี้ยังแสดงให้เห็นว่าวิธีการหาปริมาตรโดยการใช้ TLS สามารถนำมาทดแทนวิธีการแบบ Destructive Method ได้ซึ่งจะมีผลประโยชน์อย่างมากในงานด้านอุตสาหกรรมผลผลิต
จากเทคโนโลยี Precision Agriculture ที่เป็นการจัดการผลผลิตให้ได้มีประสิทธิภาพสูงที่สุดซึ่งมีหลากหลายวิธีเช่น การใช้ UAV ใช้หา Biomass และ Canopy ของผลเกาลัด (Gennaro s. et al., 2020), การรังวัด Canopy แบบ Airbone LiDAR ของต้นยูคาลิปตัส (Rodrigo et al., 2020) และการหาปริมาตรของต้นยูคาลิปตัสในเขตพื้นที่ป่าฝนในประเทศออสเตรเลียโดยการใช้ TLS (A.Burt et al., 2013) เป็นต้น ซึ่งในส่วนของงานวิจัยนี้เป็นส่วนหนึงของ Precision Agriculture โดยการหาปริมาตรของต้นยูคาลิปตัสในเขตร้อนชื้นอย่างประเทศไทย โดยมีแนวทางมาจากการหาปริมาตรของต้นยูคาลิปตัสในเขตพื้นที่ป่าฝนในประเทศออสเตรเลียของ A.Burt et al., 2013 ที่ได้ทำการใช้ TLS ในการเก็บข้อมูลเป็น Point Cloud แล้วนำไปคำนวณหาปริมาตรโดยใช้เทคนิค 3D Cylinder Reconstruction ที่เป็นวิธีการคำนวณปริมาตรกับต้นยูคาลิปตัสที่พื้นที่เขตป่าฝนที่เป็นการคำนวณแบบอ้างอิงจากทรงกระบอกจากการสร้างแบบจำลองทรงกระบอกเป็นท่อน ๆ ผ่านข้อมูล Point Cloud ที่ได้ทำการรังวัดมาโดยมีการคำนวณเป็นสองส่วนได้แก่ ส่วนลำต้น และส่วนของกิ่งก้านโดยผลค่าความคลาดเคลื่อนที่ได้ของการหาปริมาตรในส่วนของลำต้นอยู่ในช่วง 4.2–6.7% ซึ่งเป็นค่าความเคลื่อนของ 3D Models Reconstruction ของทรงกระบอกจาก Monte Carlo(MCRT) Simulation ที่เป็นหนึ่งในวิธีการหาค่าความไม่แน่นอนจากการสุ่มตัวเลขเพื่อศึกษาคุณสมบัติเฉพาะต่าง ๆ ของระบบ (J.Hurr et al., 2014) งานวิจัยของ A.Burt et al., 2013 ต่างจากงานวิจัยนี้ตรงวิธีการที่นำมาประมวลผลหาปริมาตรโดยงานวิจัยนี้ใช้วิธี 2.5D Volume ในการหาปริมาตรต้นยูคาลิปตัสในเขตร้อนชื้นซึ่งเป็นการหาปริมาตรโดยอาศัยการสร้างรูปแบบการสร้าง Raster บน Top View ของ 3D model ที่มาจาก Point Cloud ที่แต่ละ Pixel จะมีค่า Relative Height เป็นของต้นเองแล้วจึงนำไปประมวลผลผ่าน Software โดยผลค่าความคลาดเคลื่อนที่ได้ของการหาปริมาตรในส่วนของลำต้นอยู่ในช่วง 0–10 % เมื่อมีค่า Grid Step อยู่ในช่วง 0.00145–0.00165 ซึ่งจะเห็นได้ว่ามีช่วงของ Error ที่กว้างกว่าการคำนวณแบบ 3D Cylinder Reconstruction แต่จากการปรับค่า Grid Step ทำให้สังเกตุได้ว่าน่าจะมีค่า Grid Step เฉพาะของต้นยูคาลิปตัส ซึ่งค่านั้นจะทำให้ปริมาตรใกล้เคียงกับความเป็นจริงมากที่สุด ซึ่งเหมาะแก่การเป็นแนวทางในการศึกษาต่อเพื่อหาค่า Grid Step เฉพาะของต้นยูคาลิปตัสหรือพืชชนิดอื่น ๆ เพื่อให้ได้ปริมาตรที่ใกล้เคียงความเป็นจริงมากที่สุด
เนื่องจากต้นยูคาลิปตัสตัวอย่างมีเพียงจำนวนหนึ่งต้นเนื่องจากความจำกัดในด้านข้อมูลที่สามารถจัดหาได้ในเวลาและงบที่จำกัด แนวทางในการศึกษาต่อจึงควรเพิ่มจำนวนปริมาตรต้นยูคาลิปตัสที่นำมาศึกษาให้มากขึ้นเพื่อความแม่นยำที่ได้จากการสุ่มจำนวนประชากรที่เพิ่มมากขึ้น
ในอนาคตผู้จัดทำคิดว่าการนำงานวิจัยชิ้นนี้ไปปรับใช้กับพืชชนิดอื่นได้ไม่ว่าจะเป็น ข้าว อ้อย หรือพืชเศรษฐกิจชนิดอื่นๆ ซึ่งจะทำให้มีการตรวจสอบผลผลิตที่มีคุณภาพมากขึ้นจาการหาปริมาตรของต้นไม้ด้วยวิธีการรังวัดด้วย TLS แล้วนำมาประมวลผลปริมาตรด้วย Cloud Compare ด้วยฟังก์ชัน 2.5D volume จะเห็นว่ามีการปรับค่า Grid Step ในการสร้าง Raster ที่ทำให้ค่าใกล้เคียงความเป็นจริงมากที่สุดอยู่ ซึ่งผู้จัดทำมีความเห็นว่าค่า Grid step นี้น่าจะมีค่าเฉพาะต่างกันไปตามแต่ละชนิดและสายพันธุ์ของพืช
อ้างอิง
-Pousajja R. 1993, “Plantations in Thailand” ,Royal Forest Department (RFD) Thailand, DEC. 1993, http://www.fao.org/3/AC772E/ac772e0m.htm#TopOfPage (วันที่สืบค้น 13/11/2020)
-Nicolò Camarretta P. et al., 2020, “From drones to phenotype: Using UAV-LiDAR to detect species and provenance variation in tree productivity and structure”, Remote Sens. 2020, 29 Sep. 2020
-Lim K. et al., 2003, “LiDAR remote sensing of forest structure”, Progress in Physical Geography: Earth and Environment 27, pp. 88 – 106, 1 March 2003
-American Chemistry Society(ACS 2020), “Multimedia Water Displacement” ,Chapter 3, Lesson 2, https://www.middleschoolchemistry.com/multimedia/chapter3/lesson2 (วันที่สืบค้น 14/11/2020)
-Rodrigo et al., 2020, “Estimating Stem Volume in Eucalyptus Plantations Using Airborne LiDAR: A Comparison of Area- and Individual Tree-Based Approaches”, Remote Sens.2020, 9 May 2020
-Goudie A. 2010, “Development in Earth Surface Processes” ELSEVIER, Geomorphological Mapping, vol. 15, pp. 189 – 224, 2010
-TOPCON 2020, “3D Laser Scanner GLS-2000”, Spec., https://www.topcon.co.jp/en/positioning/products/product/3dscanner/GLS-2000_E.html (วันที่สืบค้น 14/11/2020)
-A.Burt, M.I., et al. 2013, “Rapid characterisation of forest structure from TLS and 3D modelling”, 2013 IEEE International Geoscience and Remote Sensing Symposium – IGARSS, pp. 3387 – 3390, 26 July 2013
-Thomas S. 2010, “Ch 11 Fluid”, https://www.slideshare.net/cscottthomas/ch-11-fluids , 13 Oct. 2010 (วันที่สืบค้น 15/11/2020 )
-Petrie G. and Charles K. Toth 2009, “Principles and Processing”, Topographic Laser Ranging and Scanning, Chapter 3, pp. 87 – 126, Jan. 2009
-ไพศาล สันติธรรมนนท์ 2555, “การรังวัดด้วยภาพดิจิตอล Digital Photogrammetry”, คณะวิศวกรรมศาสตร์ จุฬาลงกรณ์มหาวิทยาลัย
-สุกญัญา เชยโพธิ์ 2563, “โครงร่างวิทยานิพนธ์ การประมาณค่ามวลชีวภาพต้นแสมทะเลด้วยเทคนิคสแกนพื้นผิวเลเซอร์ภาคพื้นดิน”, คณะวิศวกรรมศาสตร์ จุฬาลงกรณ์มหาวิทยาลัย
-Gennaro s. et al., 2020, “An Automatic UAV Based Segmentation Approach for Pruning Biomass Estimation in Irregularly Spaced Chestnut Orchards”, Forests 2020, 12 March 2020
-Hurr J. 2014, “Uncertainty of measurement from basic to advance”, สมาคมมาตรวิทยาแห่งประเทศไทย